Modern vehicles are rapidly becoming more sophisticated, with countless sensors, processors and actuators being deployed to enhance functionality, safety, and efficiency. As automotive technology has evolved, the demand for a vehicle’s networking system has increased, with higher bandwidths and lower latency communication needed to maintain functionality and safety.
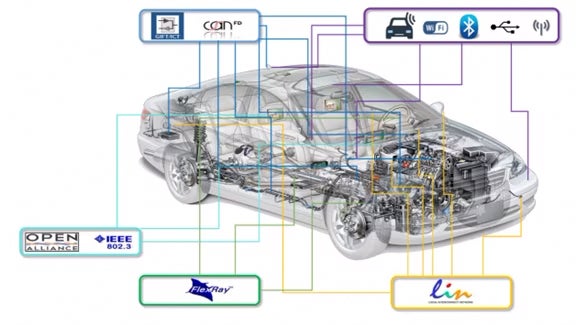
Over the years, several protocols have been developed for use primarily (or exclusively) in vehicles
While each protocol has unique attributes, they each struggle to address the needs of modern vehicles due to changing architectures and the sheer amount of data being transferred within the in-vehicle network (IVN). As a result, automakers are looking for new solutions to provide the necessary performance and bandwidth.
Automotive Ethernet
Ethernet was an obvious choice because of its widespread adoption in computing, relatively high bandwidth, and reasonable cost. However, one significant drawback for automotive use was the inability to operate in a time-sensitive or deterministic mode. This was due to the carrier sense multiple access with collision detection (CSMA/CD) inherent in Ethernet’s operation.
To enable the automotive industry to leverage the benefits of Ethernet, a new protocol was developed. Known as 10BASE-T1S, this automotive-specific variant replaces CSMA/CD with physical layer collision avoidance (PLCA) to allow for the deterministic operation that is critical to drive-by-wire use and advanced driver assistance system (ADAS) applications.
Automotive Ethernet was increasingly used for in-vehicle infotainment systems as well as ADAS system thanks to high bandwidth and low latency. Ethernet plays a major role in enabling connectivity features, such as vehicle-to-vehicle(V2V) and vehicle-to-infrastructure (V2I) communication, which are vital features for enhanced safety management.
As vehicles become more data-driven, there will be a growing need for higher bandwidth to support advanced features like autonomous driving, high- definition/ 4K video streaming, and augmented reality applications. Ethernet networks will need to provide even faster data transfer rates. And future automotive Ethernet networks must offer ultra-low latency to enable rapid decision-making and response times for autonomous driving.
Vehicle Architecture and Imaging Solutions
The organization and interconnection of the different sub-systems within a vehicle are crucial considerations for automakers. Typically, the sub-systems are organized by function (e.g., drivetrain, chassis, comfort) regardless of their placement in the vehicle. This results in significant amounts of cabling, which increases the vehicle’s cost and weight.
Recently, the preferred approach is to organize the sub-systems into “zones” depending on where they are in the vehicle. This results in clusters of non-similar functions that are often designated by vehicle locations, for example, “front right,” “rear left,” or similar. Zonal architecture is both scalable and flexible, allowing changes such as removing, adding, or upgrading sub-systems to be performed relatively easily. It also allows for the deployment of redundant and fault-tolerant elements that are essential to achieving the functional safety levels required for critical systems.
While its design alleviates the need for cabling, it significantly increases the data to be transmitted on the IVN backbone, requiring more bandwidth and performance as well as low latency. For ADAS functions, such as automatic emergency braking (AEB), sensors and control electronics will be distributed across the vehicle, and safe and reliable system operation is dependent on time-sensitive networking (TSN) to remove any latency discrepancies between. Even systems such as in-cabin noise canceling that rely on multiple microphones also require TSN to operate correctly.
Undoubtedly, deterministic (10BASE-T1S) Ethernet will play a significant role in future vehicles, especially for the backbone of a zonal architecture. Protocols such as MOST and FlexRay are unlikely to be used in new designs, but it is expected that LIN and CAN will continue to play a role, especially within the various “zones.”
There will also continue to be further development of other protocols, including camera serial interface 2 (CSI-2) and display serial interface (DSI-2), from the MIPI Alliance that are essential to ADAS and infotainment systems to connect high-resolution cameras, sensors and displays in modern vehicles. Furthermore, there is a move towards a standardized SerDes solution under development by the MIPI Alliance and Automotive SerDes Alliance (ASA). As part of this collaboration, research is also being conducted on improving the security of MIPI protocols and implementing asymmetrical ethernet for cameras, which involves transmitting at high bandwidths and receiving lower ones. But the most significant architecture change is that CAN will no longer be the default protocol for the main vehicle communication’s backbone – with Ethernet assuming that role.
onsemi and IVN
onsemi has been heavily involved in IVN for over 30 years, with a broad product portfolio backed by excellent customer and application support. Our product portfolio covers all the main existing IVN technologies such as LIN, CAN and FlexRay, while we continue to provide enhanced IP to exceed automotive requirements and demands.
With the importance of 10BASE-T1S ethernet to the automotive industry continuing to increase, much of our development resources will be concentrated here. Following up on recently released solutions, the second-generation products with elevated performance are already in development to help support the industry’s continued push towards zonal architectures and automated driving.